A visual representation of my past and current experience — click any item to jump to its section
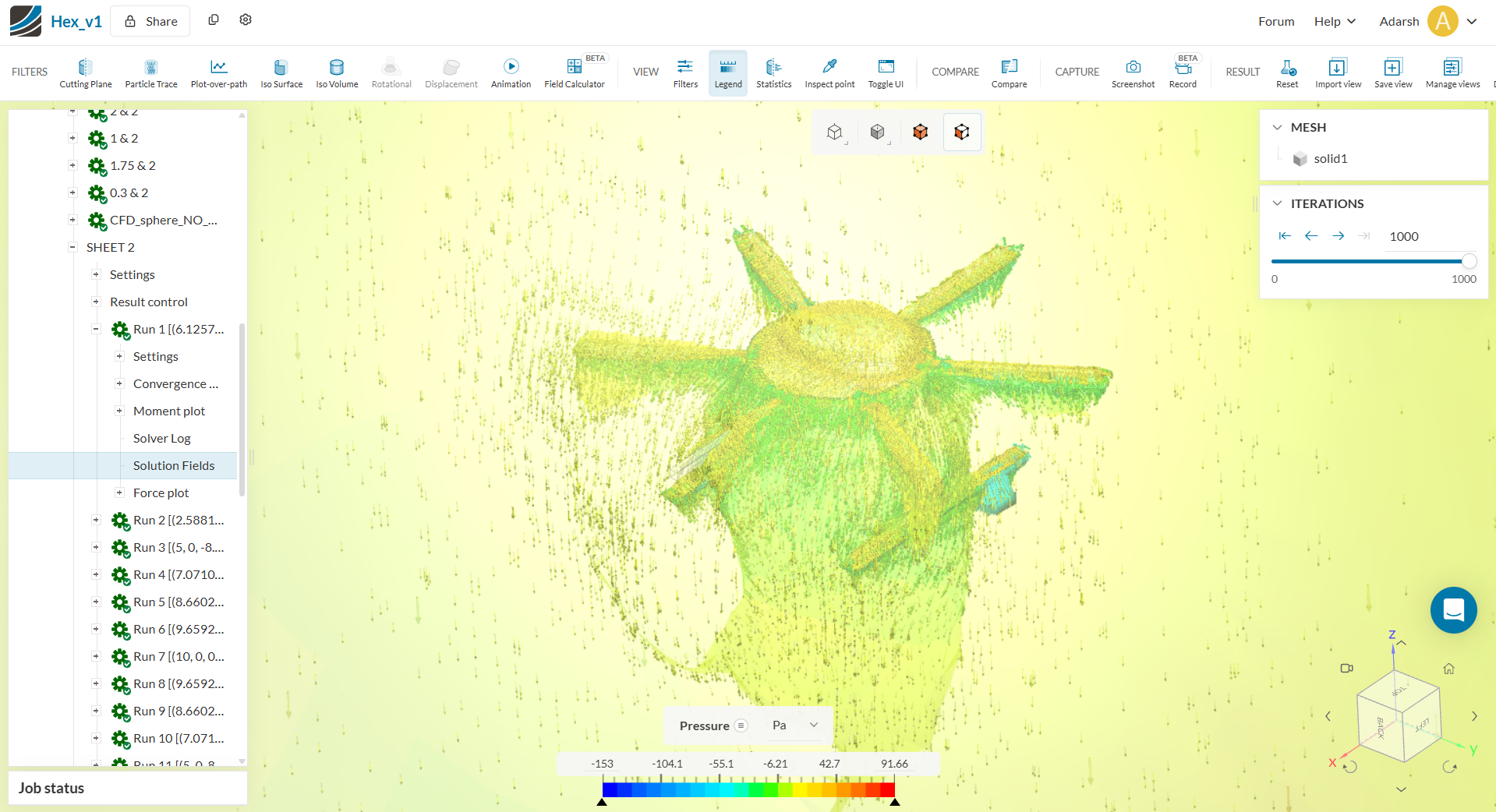
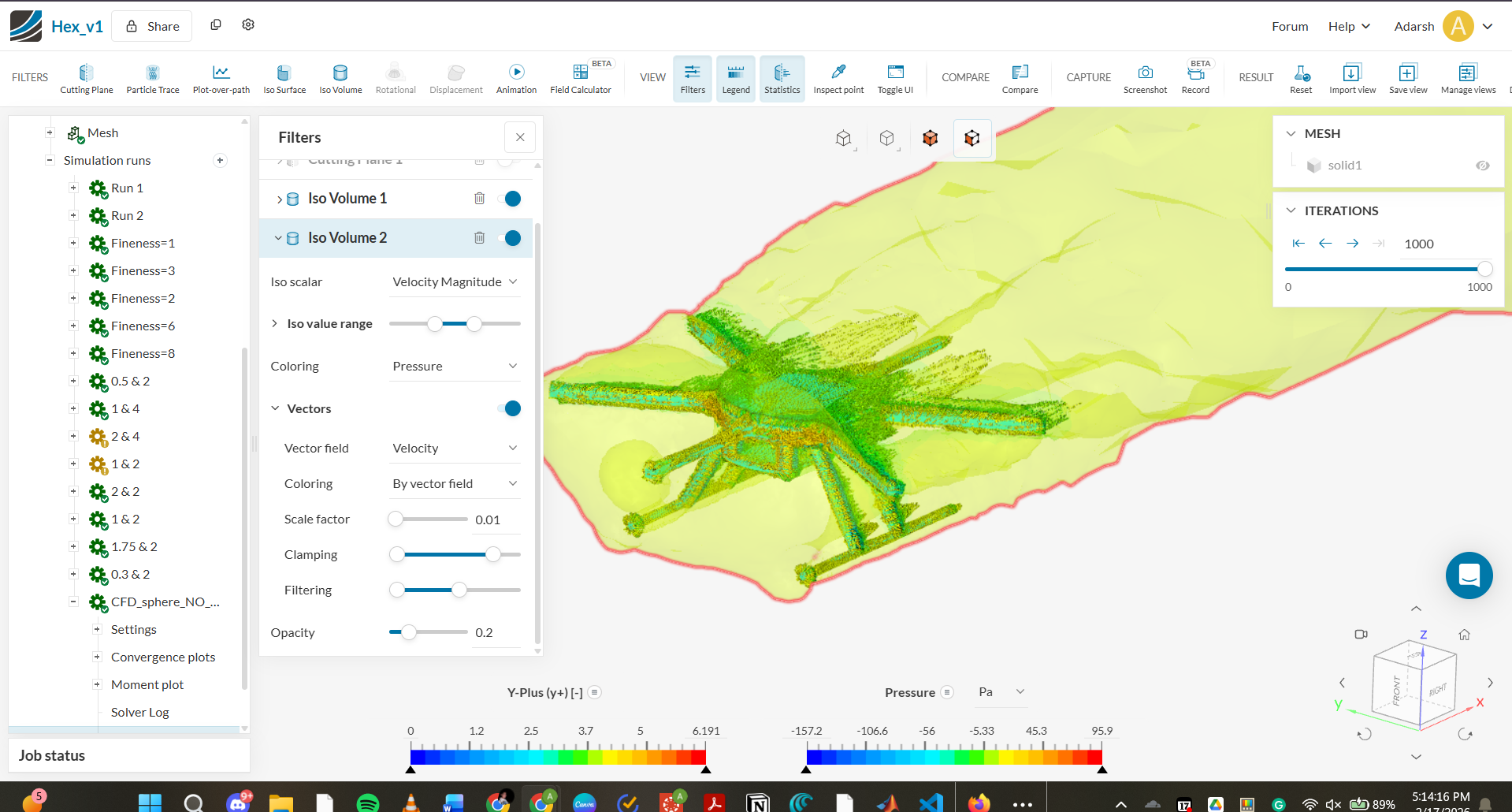









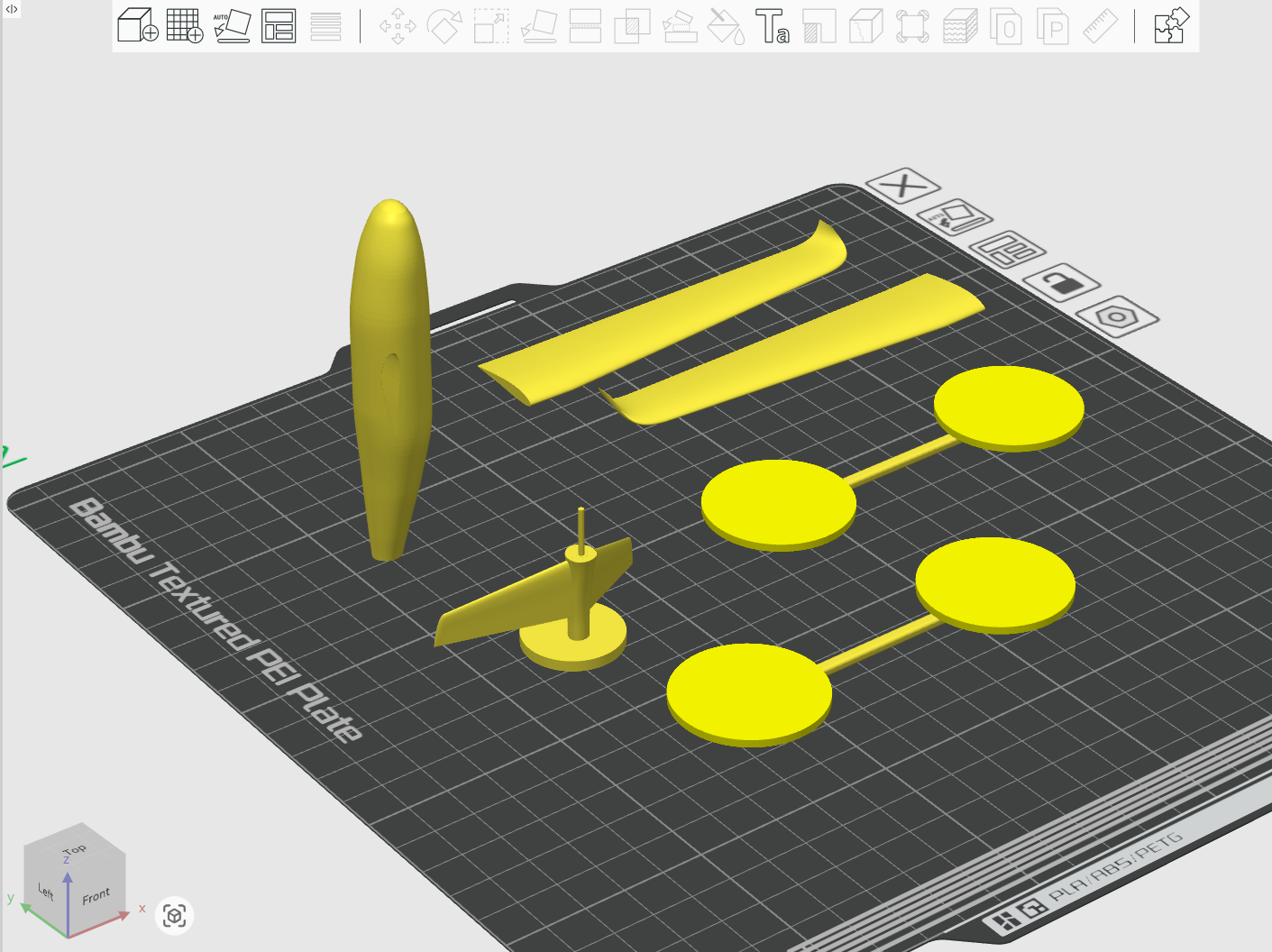
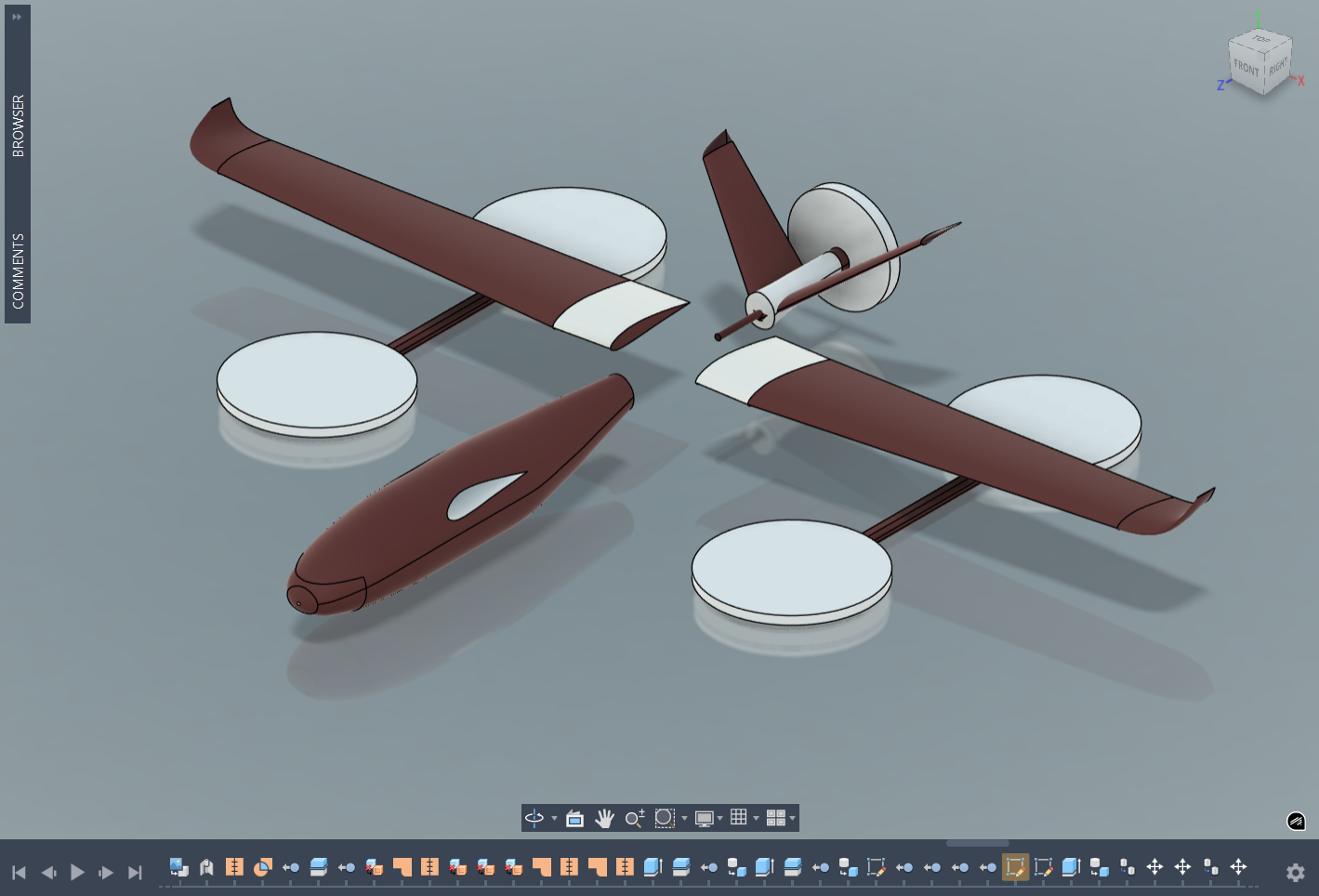
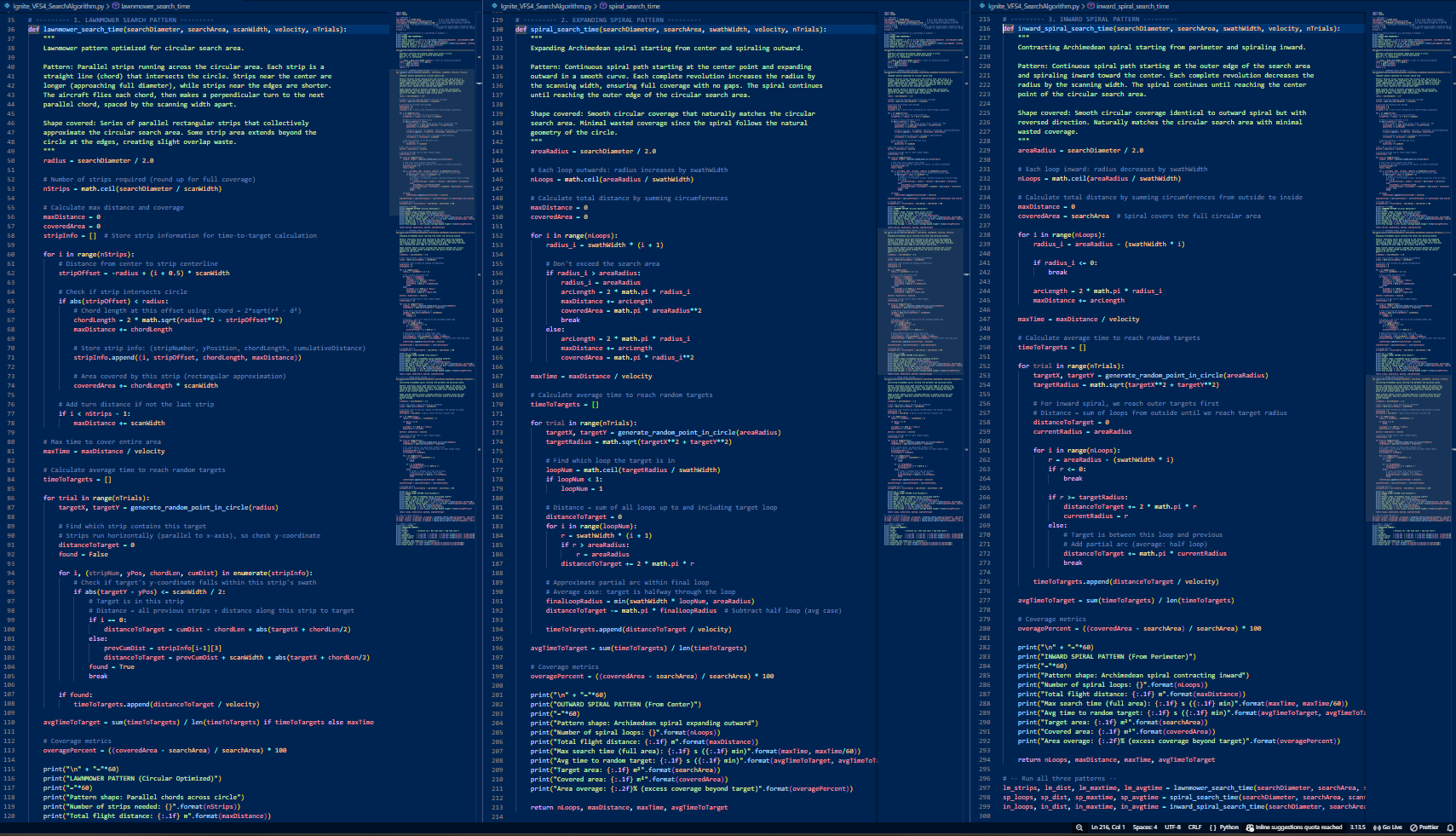
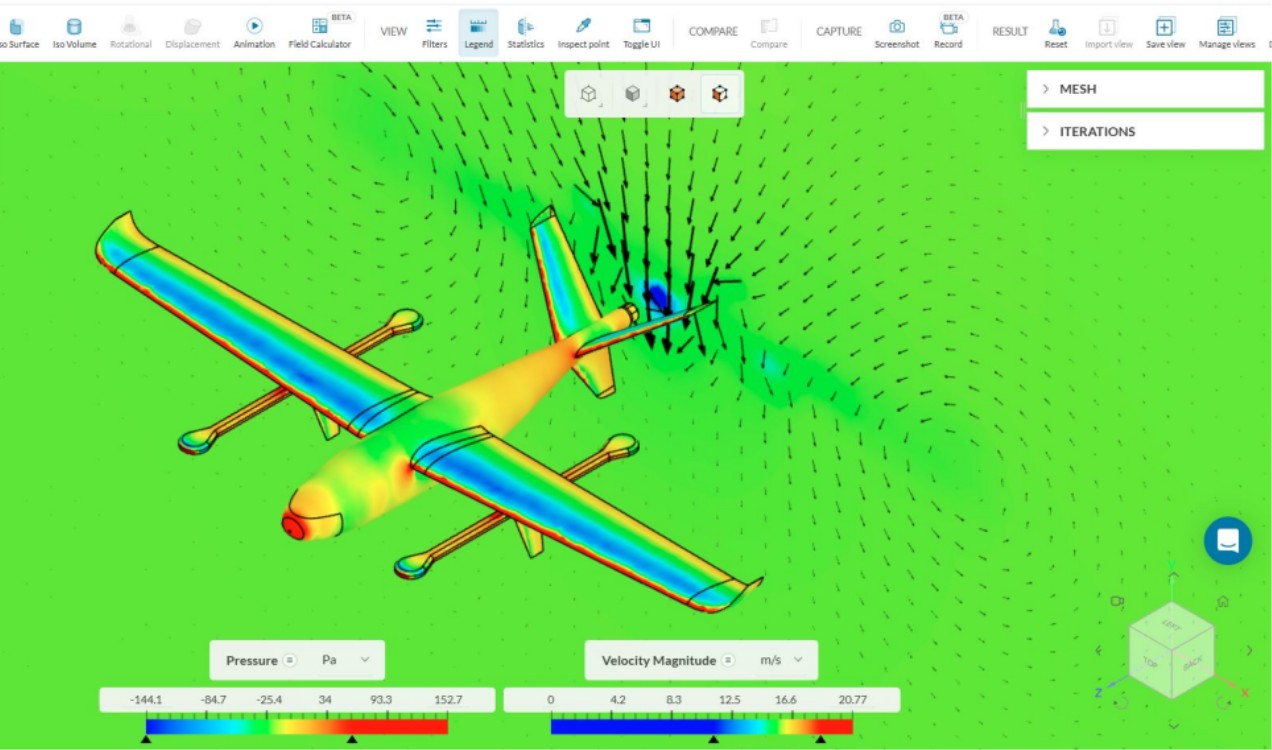
12-member team lead for the Lunar Search and Rescue (LSAR) Challenge at TAMU SEDS, hosted by Space Team University




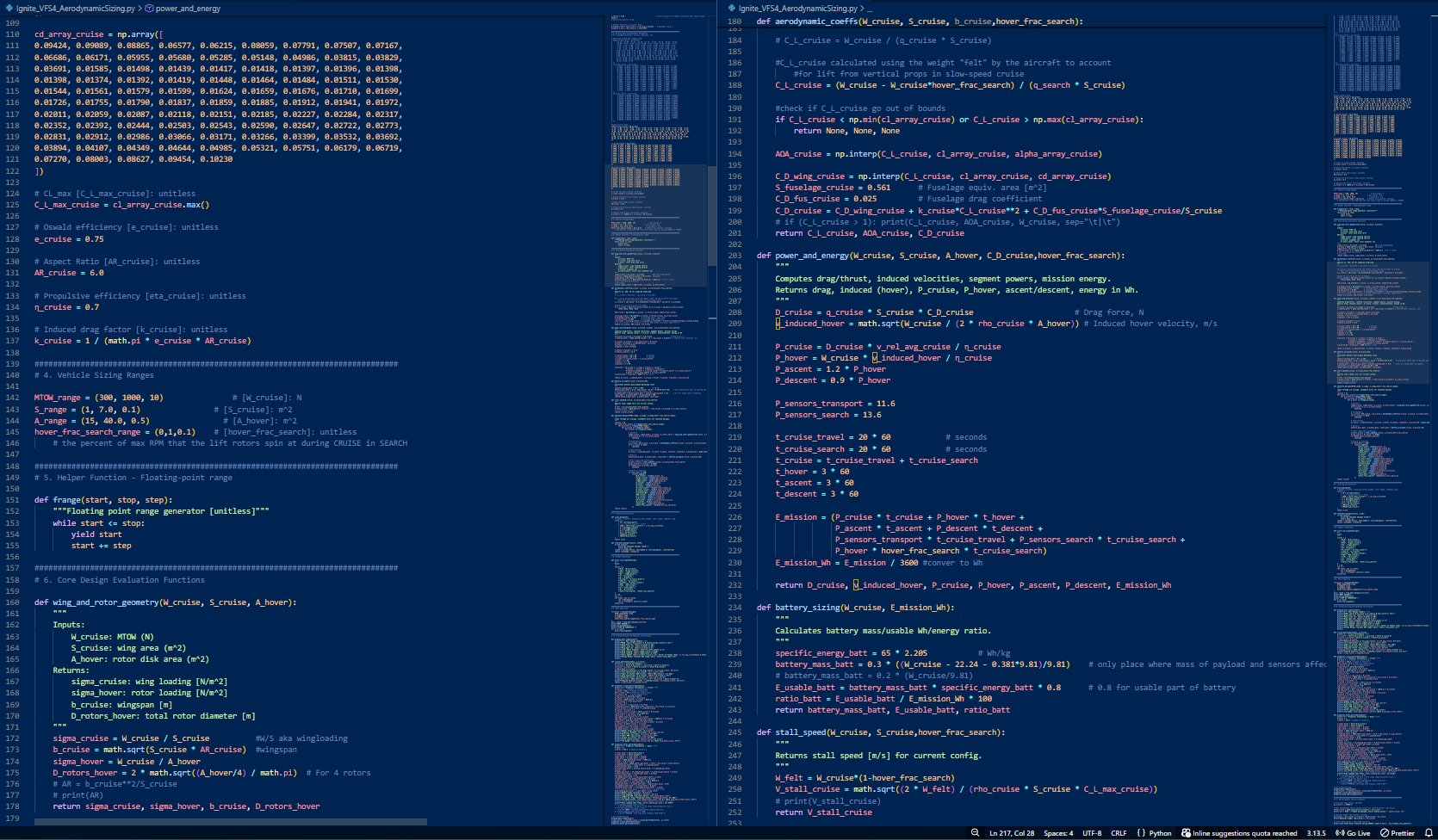
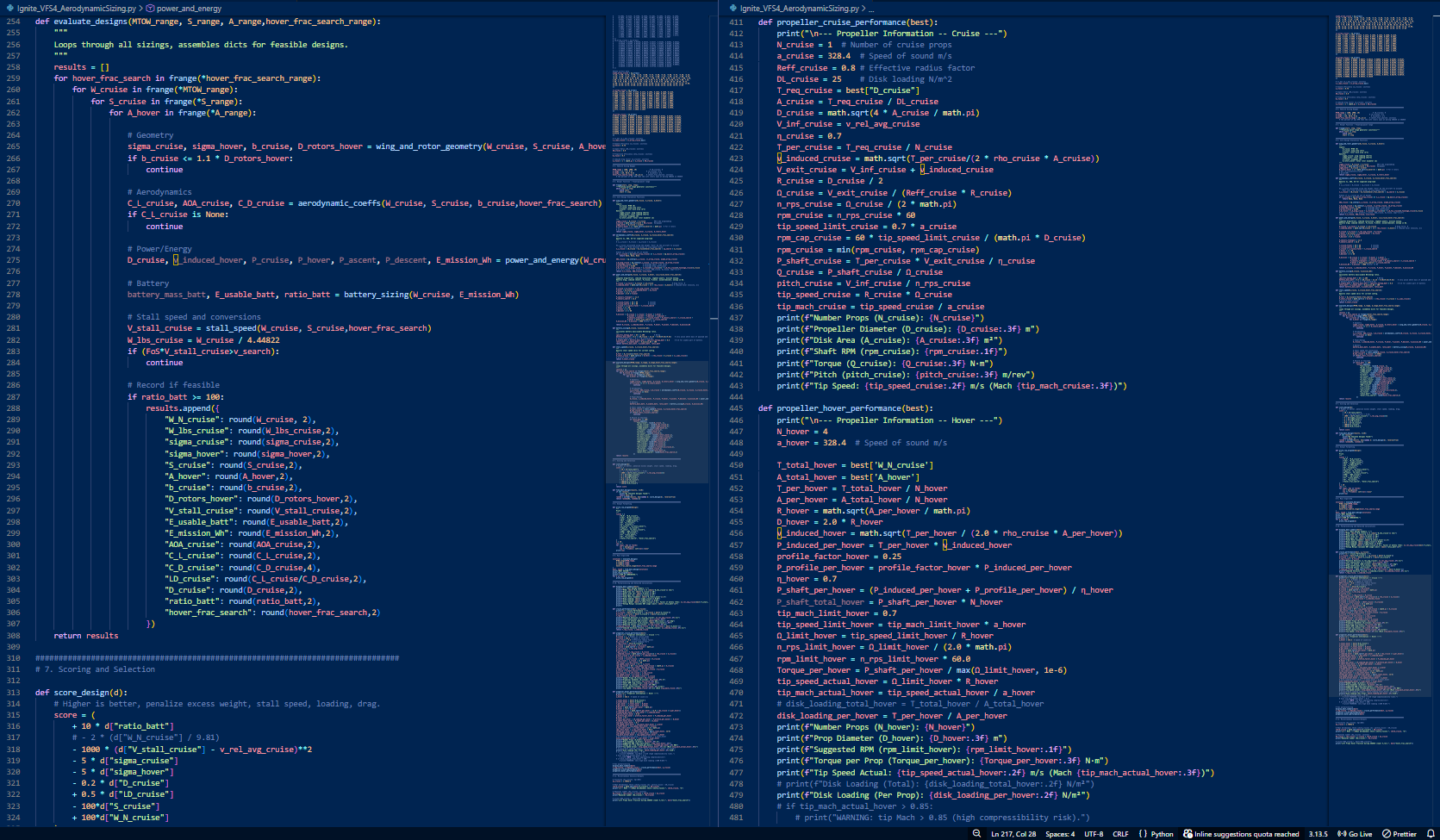
Iterated
through 2,362,692 sizing configurations, varying:
[1] MTOW, [2] S (wing planform area),
[3] A (total lift-propeller area), and
[4] hover fraction

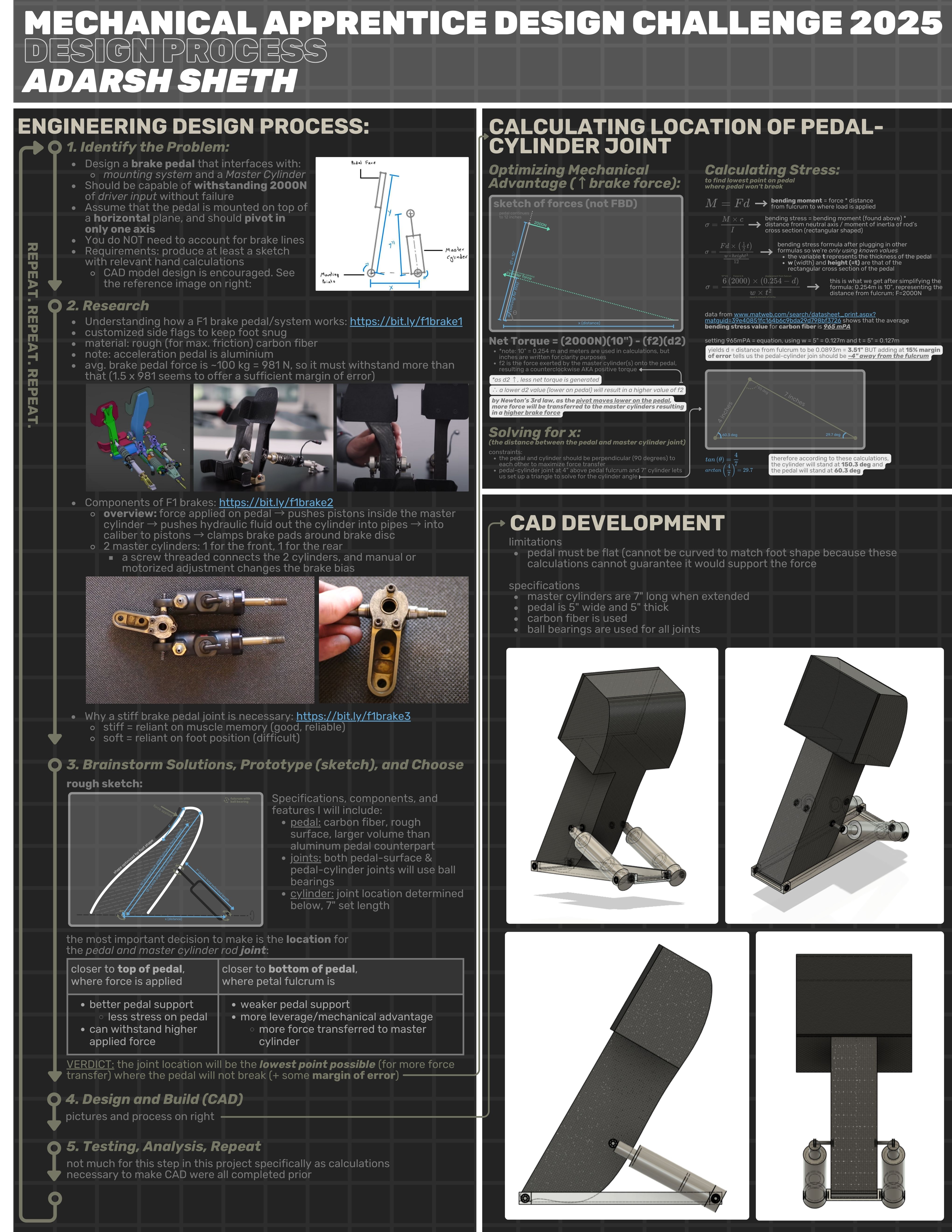
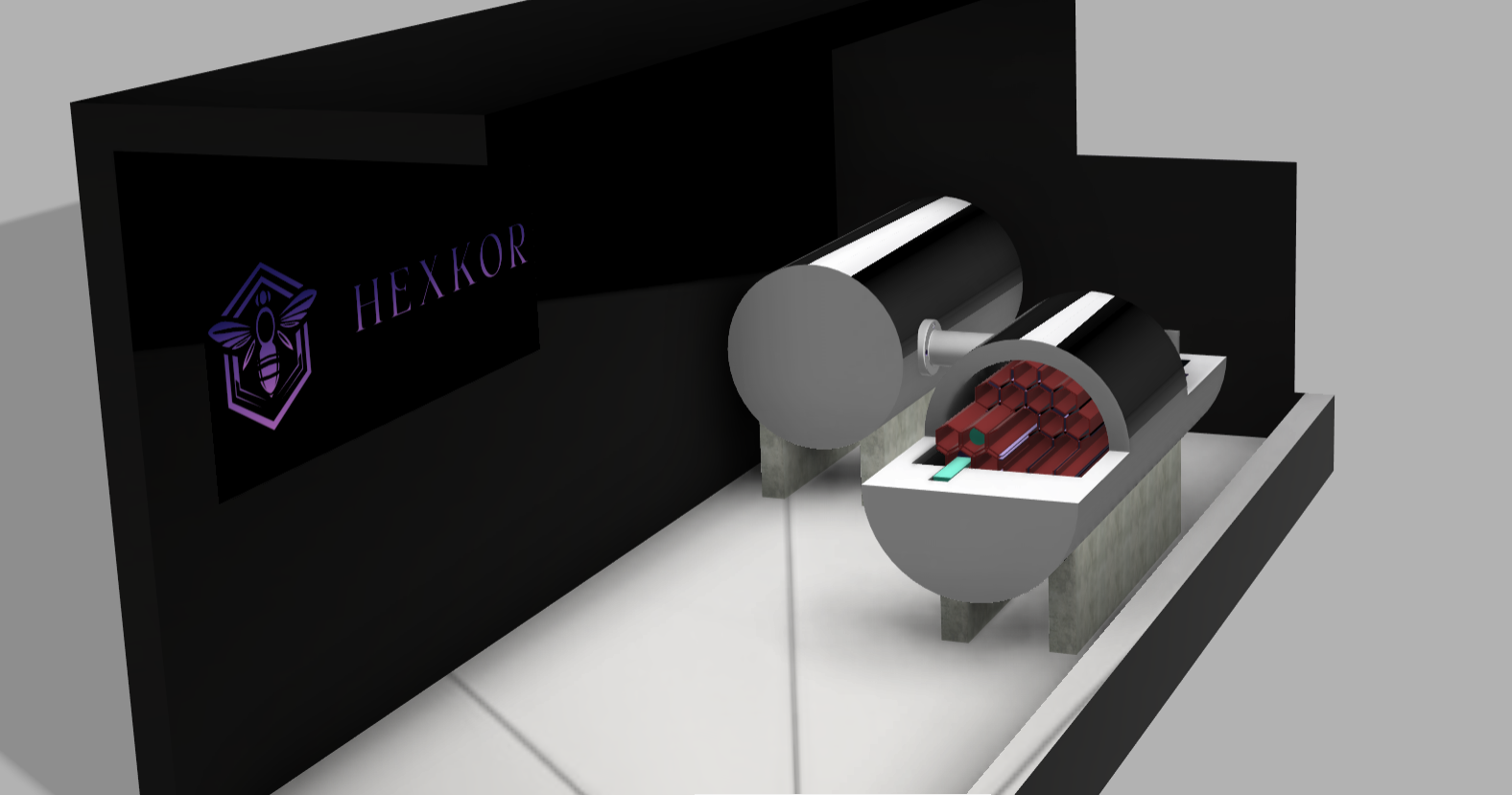
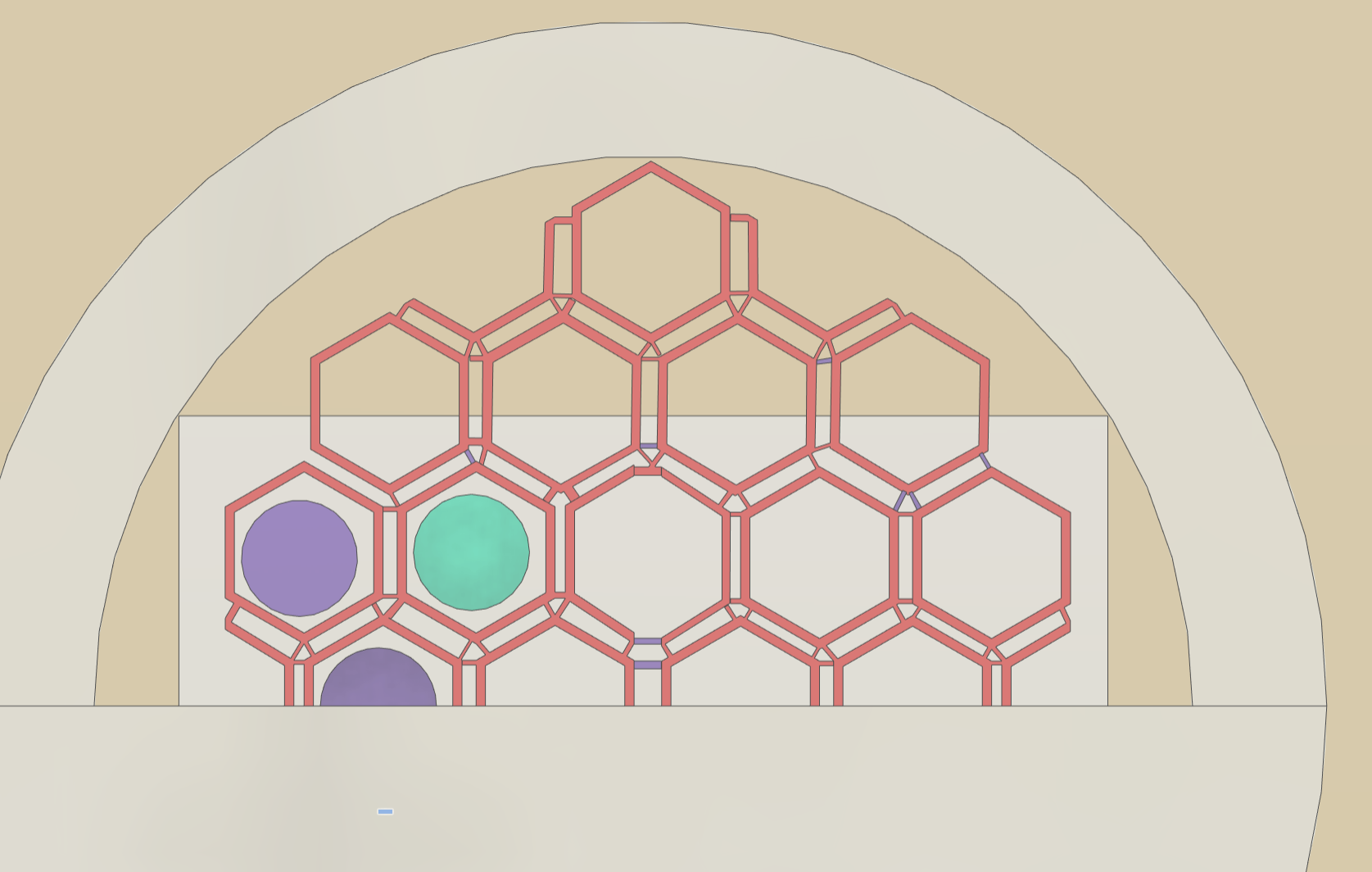
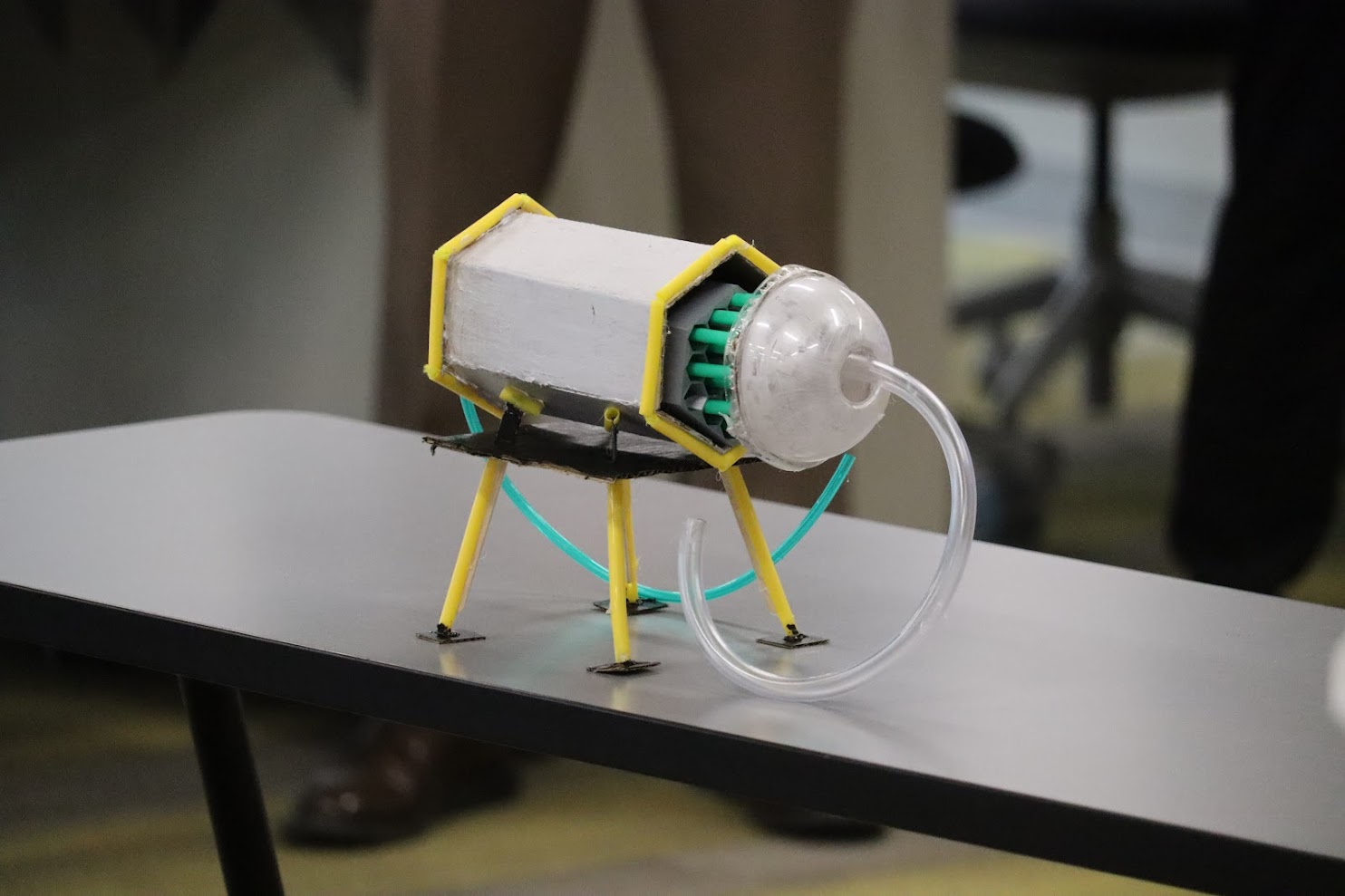
Designed, prototyped, and presented a plate-design small modular nuclear reactor (SMR) proof of concept from a need statement
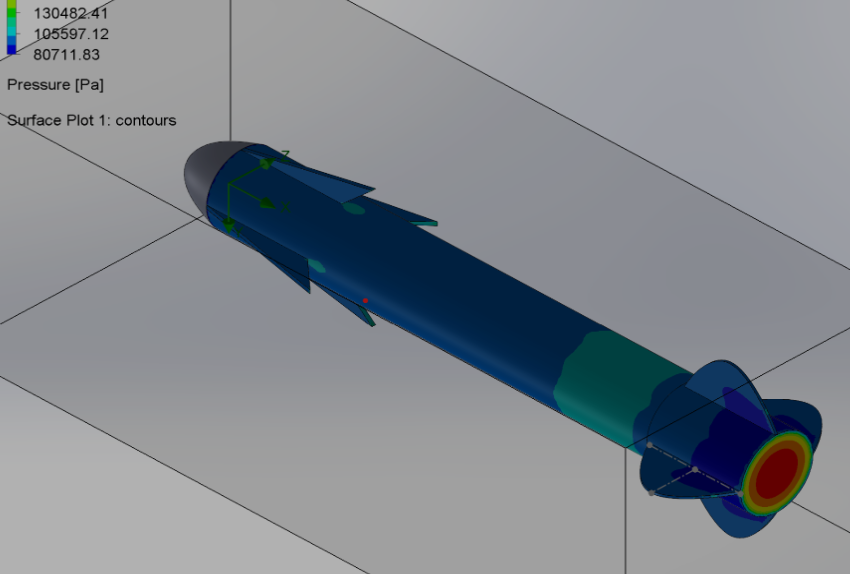
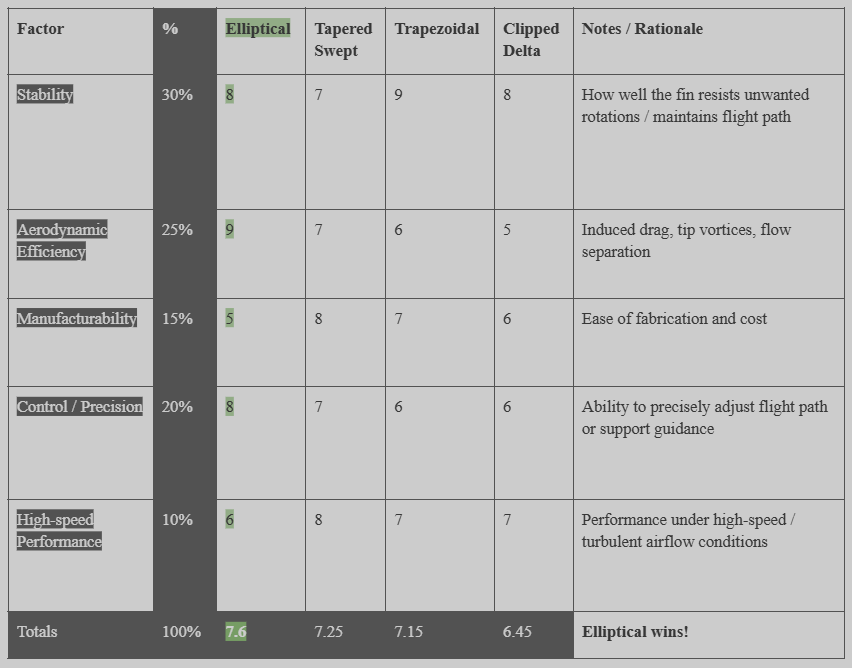
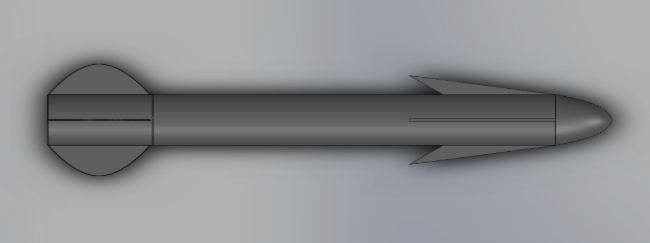
Worked in a 4-person team to design a rocket, produce CAD/FEA, conduct aerodynamic research and calculations (propulsion and drag), and code a landing simulation to determine thrust activation altitude
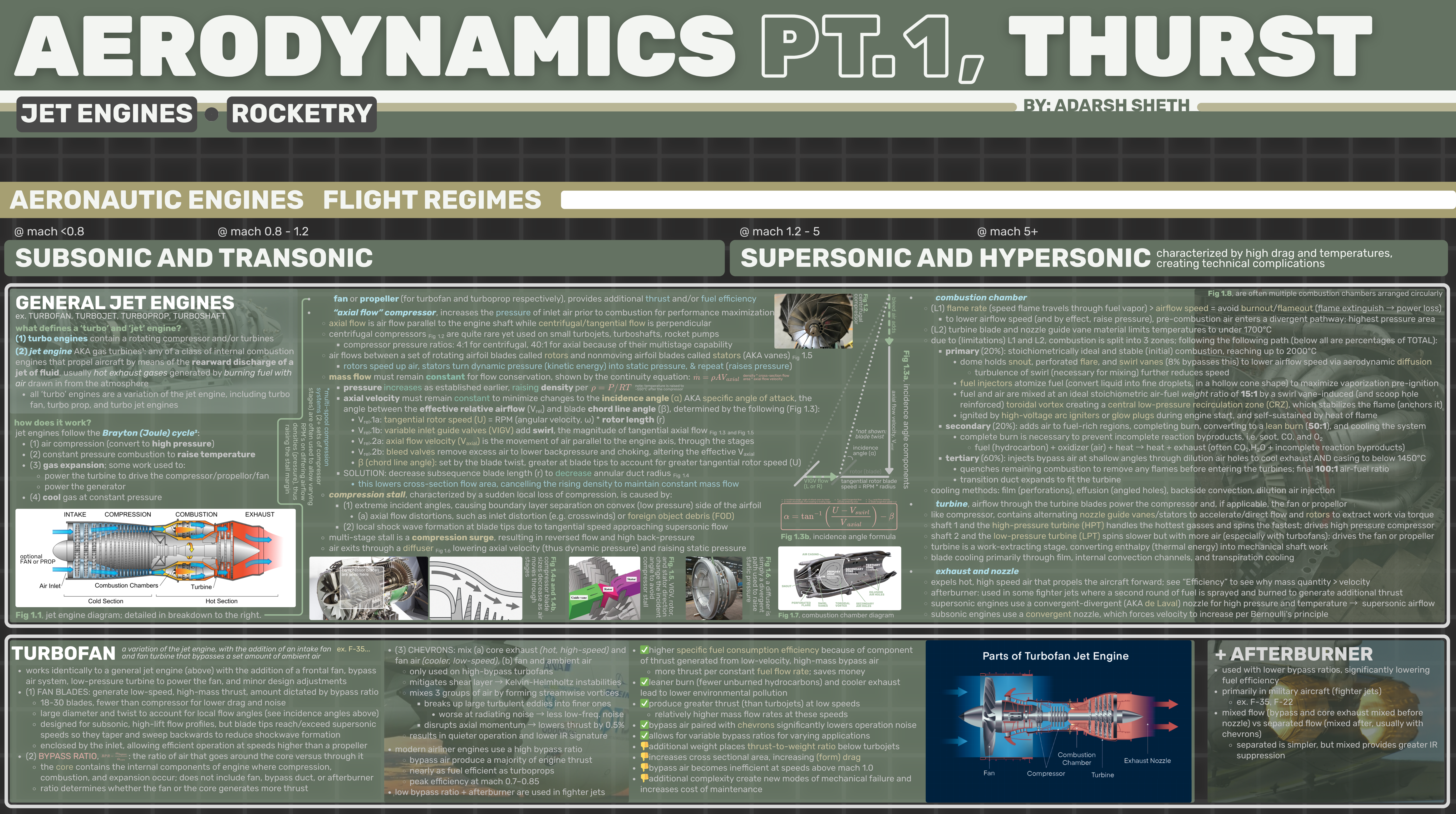
An emphasis on the 4 forces of flight (thrust, drag, lift, weight) and the design components corresponding to each — exploring engineering principles and processes that shape, limit, and optimize design
See below: an introduction to the jet engine, beginning with the general stages and process, then branching into its variants.